Нужны ли роботам ноги

Редкий посетитель Х международного форума «Атомэкспо» не сделал селфи с антропоморфным роботом «РосРАО». Можно было не только попозировать рядом с андроидом, но и, надев специальный жилет, побыть оператором механического «аватара». «СР» пообщалась с создателем робота для обращения с радиоактивными отходами — заместителем гендиректора по международной деятельности и новым бизнесам «РосРАО» Сергеем Флорей.
Текст: Иван Моргунов / Фото: «Страна Росатом», «РосРАО»
— Как появилась идея создания такой машины?
 — Об этом мы задумались в 2012 году. Ключевым моментом стал увеличившийся объем работ по выгрузке навальных радиоактивных отходов в рамках первой федеральной целевой программы по обеспечению ядерной и радиационной безопасности. Нужно было искать способы повышения производительности труда и унифицировать нестандартное оборудование, которое используется при извлечении навальных РАО. Особенно тех отходов, которые упакованы в мешки и могут содержать стеклянные предметы. Такие РАО грейферным ковшом захватывать опасно, вот мы и решили попробовать новые технические решения. Целый год с коллегами-конструкторами думали, каким может быть технический облик робота, в каких сферах его можно применять. Базовая проверка концепции робота прошла на молодежном конкурсе «Инновационный лидер атомной отрасли — 2014». Вышел в финал и победил, затем еще полтора года согласований — и запуск проекта. Так все и сложилось.
— Об этом мы задумались в 2012 году. Ключевым моментом стал увеличившийся объем работ по выгрузке навальных радиоактивных отходов в рамках первой федеральной целевой программы по обеспечению ядерной и радиационной безопасности. Нужно было искать способы повышения производительности труда и унифицировать нестандартное оборудование, которое используется при извлечении навальных РАО. Особенно тех отходов, которые упакованы в мешки и могут содержать стеклянные предметы. Такие РАО грейферным ковшом захватывать опасно, вот мы и решили попробовать новые технические решения. Целый год с коллегами-конструкторами думали, каким может быть технический облик робота, в каких сферах его можно применять. Базовая проверка концепции робота прошла на молодежном конкурсе «Инновационный лидер атомной отрасли — 2014». Вышел в финал и победил, затем еще полтора года согласований — и запуск проекта. Так все и сложилось.
— Робота собирали специалисты «РосРАО» или нанимали подрядчика?
— На конкурсной основе выбрали подрядчика — НПО «Андроидная техника» из Магнитогорска. В этом проекте мы не только решили сложную техническую задачу, но и отработали новую для нас схему совместного с подрядчиком финансирования НИОКР. Сама по себе разработка этого робота — достаточно рисковое занятие: до сих пор не до конца понятно, найдет ли он широкое применение в нашей отрасли. Поэтому объявление тендера по схеме долевого участия 60% («РосРАО») на 40% (подрядчик) позволило разделить финансовые риски, связанные с разработкой, и повысить вовлеченность подрядчика в создание робота и расширение области его применения, это важно в НИОКР. Привлечение в проект магнитогорской команды весьма позитивно повиляло на технический облик робота, у них уже есть опыт создания андроида (см. справку). Но, несмотря на общую антропоморфность, это две разные платформы: наш робот построен по смешанной схеме гидравлика — электричество, их — полностью электрический.
— Все ли задуманные функции вам удалось в этой машине реализовать?
— Как вам сказать. Дело в том, что до сих пор никто в мире толком не применял подобную технику в операционной деятельности. Пока вообще не очень понятно, где робот будет наиболее эффективен. Последние полтора года, тестируя его, мы пытаемся понять, где лучше всего использовать такие машины. Но очевидно, что, если мы сможем автоматизировать труд операторов при обращении с РАО и, например, вместо трех человек, работающих в три смены, будет работать один робот и два оператора в две смены, то производительность труда, экономическая эффективность значительно возрастет.
Справка
Мобильный роботизированный манипулятор антропоморфного типа повторяет движение рук оператора, что дает ему возможность бережно сортировать хрупкие материалы или объекты нестандартной формы. Также он может использовать общепромышленный ручной инструмент для демонтажа оборудования и работать при высоком уровне радиации. Использование гидромеханической схемы позволяет роботу выполнять работы с длительным сохранением усилия (например, удерживая инструмент или груз). Оператор при этом может находиться на удалении до 100 м от места работы.
Собирали робота в Магнитогорске, в НПО «Андроидная техника» те же инженеры, что создали антропоморфа Федора (от англ. FEDOR — Final Experimental Demonstration Object Research,) — первого российского человекоподобного робота, разработанного учеными для Фонда перспективных исследований и Военно-промышленной комиссии РФ. Его планируют использовать в пилотируемых космических кораблях в качестве помощника космонавтов: летные испытания робота Федора на корабле начнутся в 2021 году.
— Вообще ядерная робототехника сегодня — мировой мейнстрим. Особенно много технологий возникло после фукусимской аварии, но это скорее отдельное направление в робототехнике — роботы для ликвидации последствий аварий. Из-за высокого уровня радиации ключевую роль там играет живучесть техники, а сами роботы выполняют примитивные операции — что-то привезти, отвезти, поднять. Это скорее электротехника, чем робототехника. А вот когда мы говорим о повседневной операционной деятельности при обращении с РАО или выводе из эксплуатации объектов использования атомной энергии, где речь не идет о высоких уровнях радиации, характерных для аварийных ситуаций, тогда уже корректно вводить термин «робототехника». Такие роботы могут подстраиваться под окружающее пространство, у них больше степеней свободы, что позволяет им выполнять более сложные операции. Отдельное направление робототехники, в котором мы тоже работаем, — создание промышленных манипуляторов. Их рынок давно сформировался, выбор достаточно широк, они дешевле нестандартного оборудования.
— Если манипуляторы неплохо справляются, зачем создавать сложного человекоподобного робота?
— Все познается в сравнении. Например, в применении промышленных манипуляторов англичане на своем заводе в Селлафилде ушли далеко вперед по сравнению с остальными странами. Однако сейчас при обращении с РАО они столкнулись с нехваткой гибкости и степеней свободы у своих манипуляторов, чего в достатке у антропоморфных роботов. Сейчас они пытаются увеличить количество степеней свободы за счет использования роботизированных манипуляторов в виде рук, а не схватов. Однозначного мнения, как это реализовать и что лучше, на данный момент нет. Похожие разработки сейчас ведут США, Франция, Великобритания, Япония. В январе следующего года состоится международное совещание, туда съедутся основные производители и потребители робототехники и постараются выработать общие стандарты того, как в атомной энергетике должна быть представлена робототехника, какие должны быть подходы к оценке безопасности, ресурсности и других эксплуатационных характеристик.
— Какой уровень радиации выдерживает робот и как долго он может работать в опасной среде?
— Его эксплуатационный срок — 10 лет. По уровню радиации вопрос открытый, нет единой базы по стойкости радиационных компонентов. Мы считали поле нормальной эксплуатации — 500 мЗв/ч, но экспериментальных цифр еще нет. Ресурс может быть продлен, так как после каждого использования робот проходит техосмотр — проверяются подшипники, меняется масло, видеокамеры вообще расходный материал.
— Сейчас робот выполнен в виде торса с руками и головой, не планируете приделать ему ноги?
— По поводу ног часто спрашивают. Потребности в них нет никакой. Технически проще и экономически целесообразнее использовать существующие стандартные грузоподъемные механизмы по доставке робота к месту работы. Так что после испытаний внешне он, думаю, мало изменится.
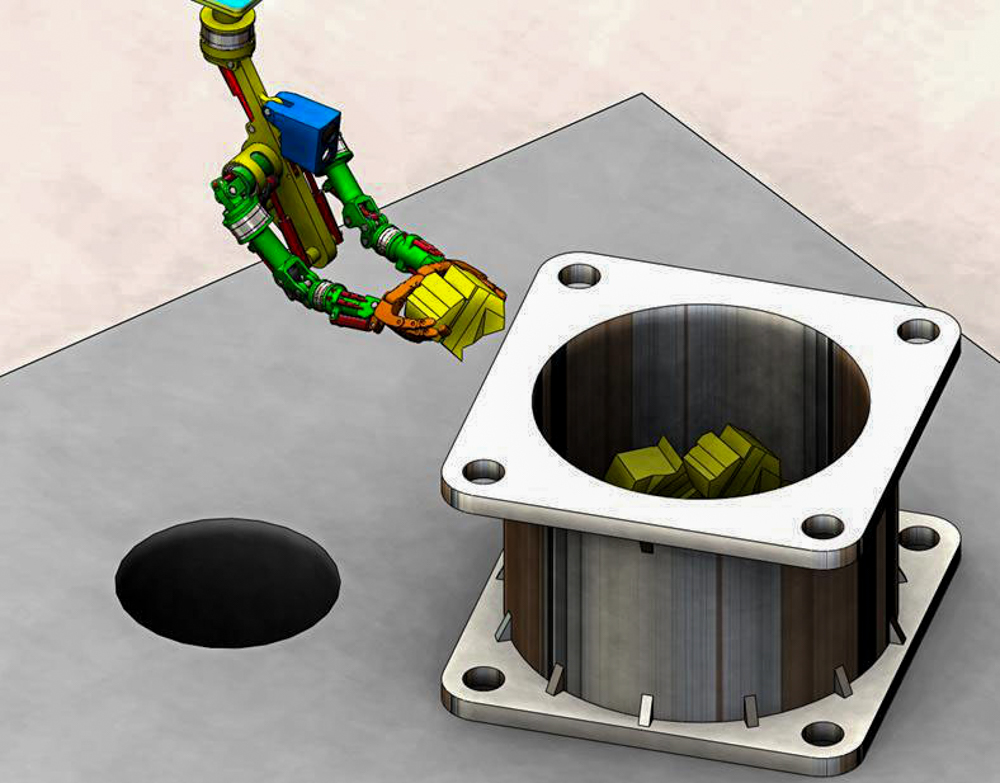
Антропоморф повторяет движение рук оператора, что дает ему возможность бережно сортировать хрупкие материалы
Меня больше волнует вопрос взаимодействия оператора и робота в части управления — удобства, хронометрирования. Так как оператор в шлеме виртуальной реальности видит картинку в режиме реального времени, надо понять: ему лучше при этом стоять или сидеть, сколько человек должны ему помогать, насколько широкий угол обзора должен быть, какая дополнительная информация нужна оператору, сколько он должен отдыхать и т.д.
— Сможет ли робот когда-нибудь работать автономно, без участия человека?
— Именно к этому все и стремятся. Проблемы сделать робота больше не существует, их собирать начинают даже дети в школе из лего. Самое сложное — понять, в какой виртуальной среде будет действовать робот. Причем основной вызов сейчас — не разработать программное обеспечение, а создать техническое зрение и увязать его с ПО. Как определить, что перед роботом и что ему с этим делать в автономном режиме, без участия человека? Существуют отдельные алгоритмы «что делать», «выбрать оптимальный маршрут и метод дезактивации» и так далее, и выбрать, какую команду выполнить роботу, оператор может легко. А вот как научить робота без вмешательства человека составлять характеристику объекта: из какого он материала, какой уровень загрязнения, как оно распределено по площади и объему? В этом вопрос.
— Но беспилотные автомобили уже ездят по улицам городов, хоть и под присмотром человека.
— Беспилотный автомобиль строит окружающий мир как набор твердых плоскостей, производит геометрическое картирование. А для нашего робота геометрическое картирование — только первый шаг. Дальше ему нужно наложить на эту карту характеристики объектов и их взаимосвязи, определить, что из этих объектов — дерево, что металл, что стекло. Потом нужно определить состав, вид излучения, глубину проникновения, то есть понять свойства объекта, а не только форму. Нужно не только снять показания, но и проанализировать их. Поэтому пока вопросов больше, чем ответов. Объединить датчики, ПО, алгоритмы обработки, мощности обрабатывающие, большие объемы данных — интересная и сложная задача, над решением которой сейчас работают во всем мире. Но мы постараемся полностью перевести антропоморфов на автономный режим. В перспективе такие роботы смогут полностью исключить контакт человека с радиоактивными отходами.

Примерить жилет оператора может каждый, но управлять — только специалист, сертифицированный «РосРАО»
— Робот уже прошел боевое крещение?
— Он участвовал в извлечении низкоактивных РАО из хранилищ радиоактивных отходов в северо-западном филиале «РосРАО». В ближайшее время поедет на Камчатку и будет проходить испытания по выгрузке среднеактивных РАО на производственной площадке дальневосточного отделения. Испытания продлятся до конца лета.
— Где еще его можно применять? Продавать его планируете?
— Сегодня есть рынок уникальной робототехники, а рынка регулярной робототехники пока нет, он только формируется. Во всем мире понимают, что должна вырасти производительность труда, должен снизиться процент вовлечения человека в технологические операции. Но пока нет понимания, что будет востребовано и как это будет выглядеть. Для каких-то уникальных задач робот может применяться уже сейчас. Например, для манипуляций с нестандартными РАО, объектами сложной формы, с которыми тяжело обращаться дистанционно, или он может помочь достать поврежденное топливо из хранилищ в губе Андреева. В данный момент проект нацелен на потребности наших предприятий, так как объем работы очень большой. Но мы открыты для всех. По запросу в течение трех месяцев мы готовы поставить робота заказчику.
— Какие еще проекты у вас сегодня в работе?
— В течение ближайших трех-четырех лет мы хотим каждую третью операцию автоматизировать в рамках программы «Безлюдные технологии при обращении с РАО», которая сейчас запускается на нашем предприятии. Если не брать антропоморфного работа, второй по значимости проект — автоматизация сортировочного трехотсечного бокса. Что-то вроде горячих камер, где вместо обычных манипуляторов будут работать роботизированные манипуляторы в виде рук. Пока все получается хорошо.
Есть интересная история?
Напишите нам



Федеральный номер «Страна Росатом» №28 (732)
Скачать
Федеральный номер «Страна Росатом» №28 (732)
Турция, Китай, Казахстан — гендиректор «Росатома» Алексей Лихачев провел серию стратегических переговоров — стр. 4
Рассказываем и показываем, как создаются топливные композиции будущего — стр. 8
Не все понятно, но очень интересно: загадочные экспонаты Музея быта советских ученых — стр. 15
Скачать

